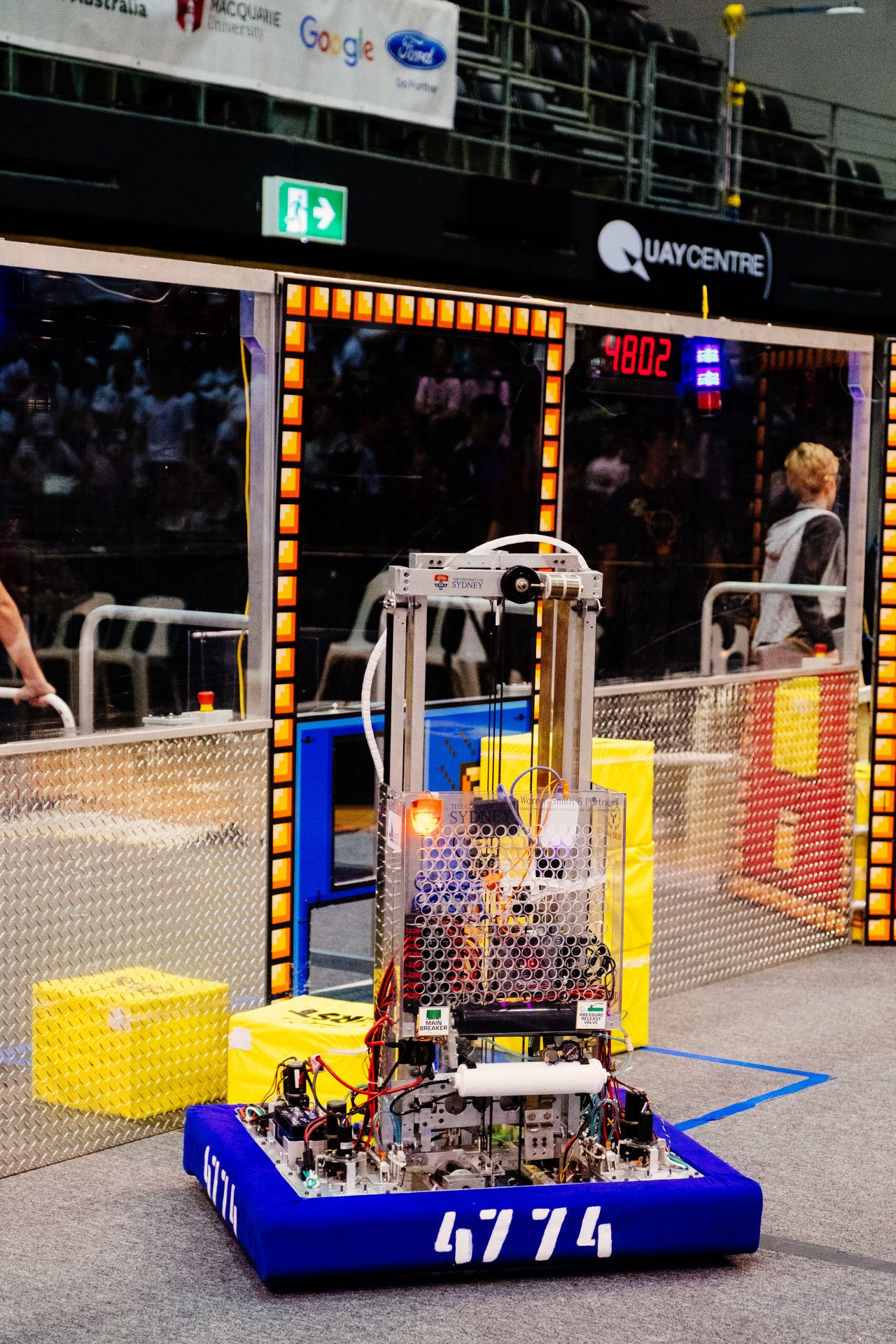
This year’s robot, Darude, was made for the FIRST: Power Up competition in 2018.
Darude was the debut robot of our in-house designed and manufactured swerve modules.
The 2018 game involved teams moving small fabric-covered milk-crate like objects from ground level to either a lower balance scale or a higher balance scale (for more points). Points were primarily achieved by controlling the scales (having the scale tipped toward their colour side) for the longest. This year saw the The Drop Bear’s develop the first iteration of a completely motorised center orientable wheel drive module.
The process of developing the centre orientable wheel required the students and mentors to work together to apply fundamental engineering knowledge and practices including trade-off studies on mechanical approaches and components, high level structural, electrical, kinetic and kinematic analysis and the use of computer aided design tools. The modules were machined and assembled by students.
The unique combination of speed, agility and pushing capacity offered the team a leading edge in game play which helped the team to achieve a position in the grand final of the Southern Cross Regional. For the development of a better drive base system The Drop Bears were awarded the Innovation in Controls Award at the Southern Cross Regional and the Creativity Award at the South Pacific Regional.
Auto Mode
Advanced Autonomous Mode
This year we used our most advanced autonomous mode yet. We used vision to find the cubes and get a cube on the scale in the first 15 seconds.
Lifting mechanism
Cascading elevator
We used a cascading lift for our lifting mechanism. It consisted of two stages, which pulled each other. This meant that the lifter could go higher than with only one stage
drive base
Swerve Drive
We used our custom swerve drive to give our robot advanced maneuverability and agility. The Swerve Drive was a project over multiple years which uses two motors to move in any direction, like a shopping trolley’s wheels, but motorised.