As the Sydney regional event nearens, the robot is steadily coming together to be a formidable force at the competition. Over the past week monumental gains have been made as the intake mechanism takes form. The intake mechanism is comprised of a front roller and two inner feeder rollers to center the balls for the indexing mechanism and yields substantial performance improvements from our previous prototype. A new iteration of the intake mechanism is currently in the works to further refine the dimensions and structure to be effective and robust on the field.
The control systems sub-team has also been able to make progress on its sophisticated use of vision tracking to calculate the distance of the goal from the robot to autonomously control the speed of the shooter wheels and allow the robot to shoot goals accurately and precisely from anywhere on the field.
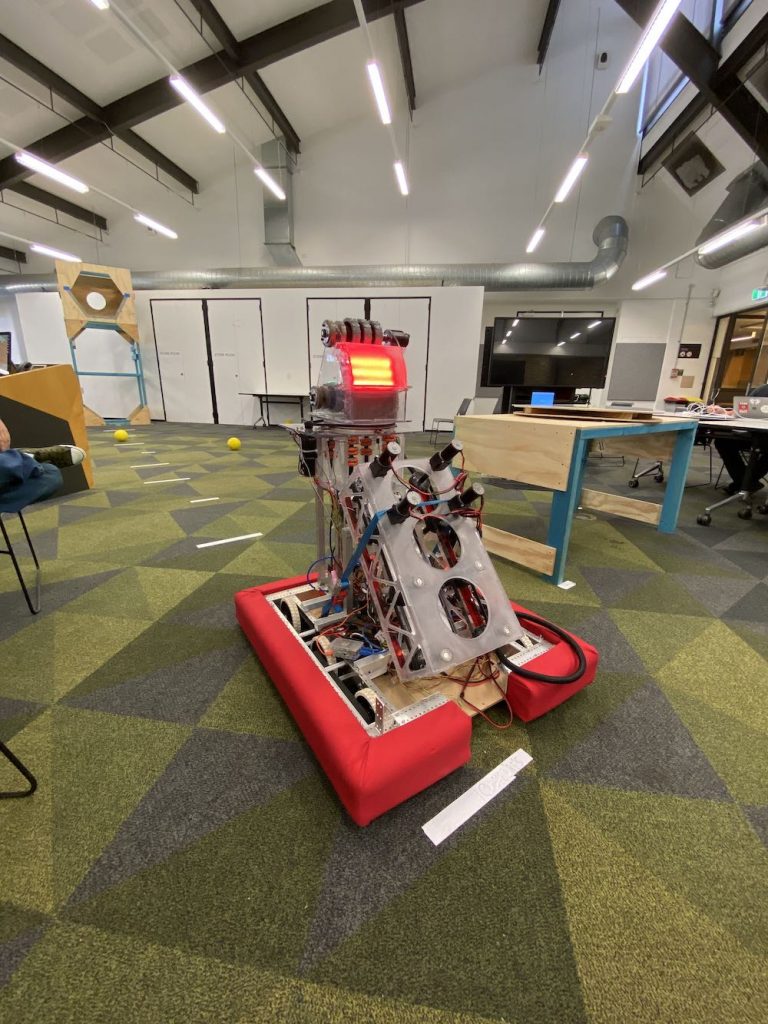
The mechanisms are steadily being assembled onto the drive base with the shooter, indexer, and intake mechanisms successfully mounted and integrated. The controls sub-team has been calibrating the speed of the shooter’s flywheels to be able to achieve its vision tracking goal. The robot has been able to consistently fire shots at the goal without fail making the team incredibly excited for competition.