The first group which is called drive base is designing the base of the robot. They have built cad modelling and prototype.
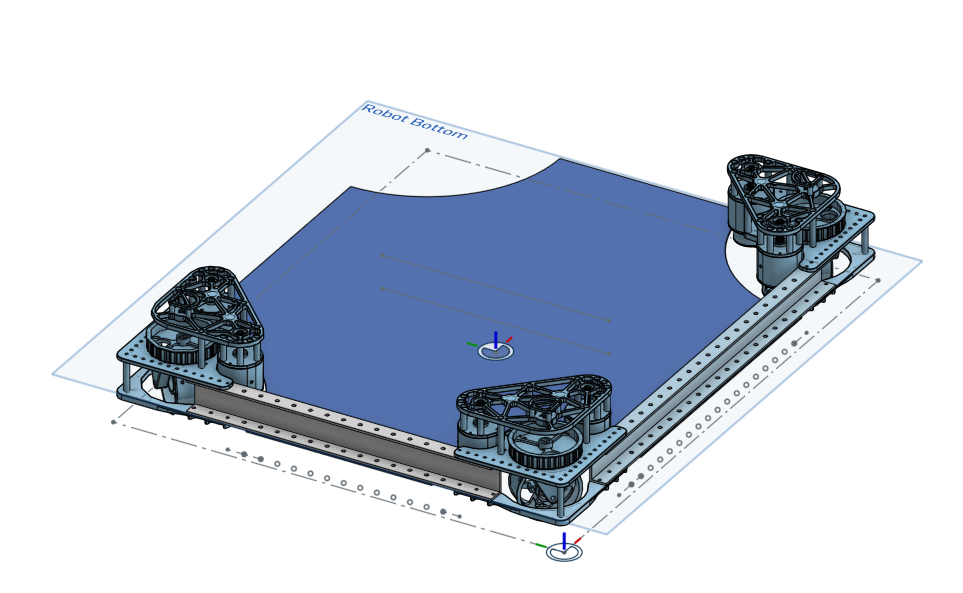
The drive base uses a design based on SDS Mk4i swerve drives, as they have proven themselves to be very versatile and reliable during the last year’s competitions. It is made to be non-square, unlike the previous year’s design, and is shaped like and elongated rectangle – this is done to ensure that it fits on the charge pad with other robots.
Onshape Screenshot
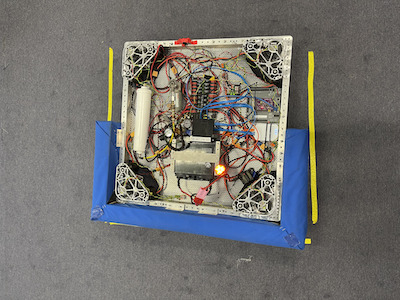
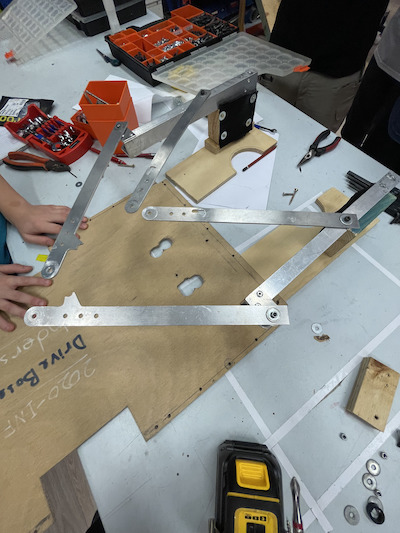
Prototype
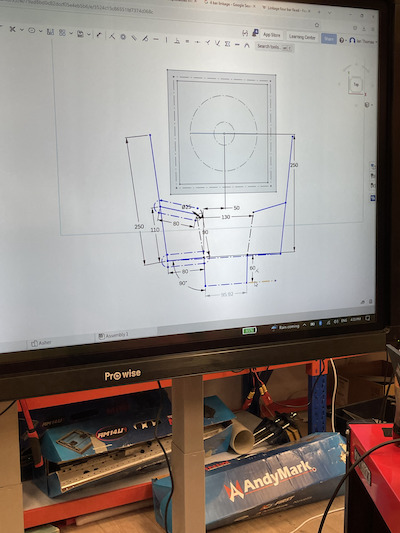
Team working on mechanism
Emplacement
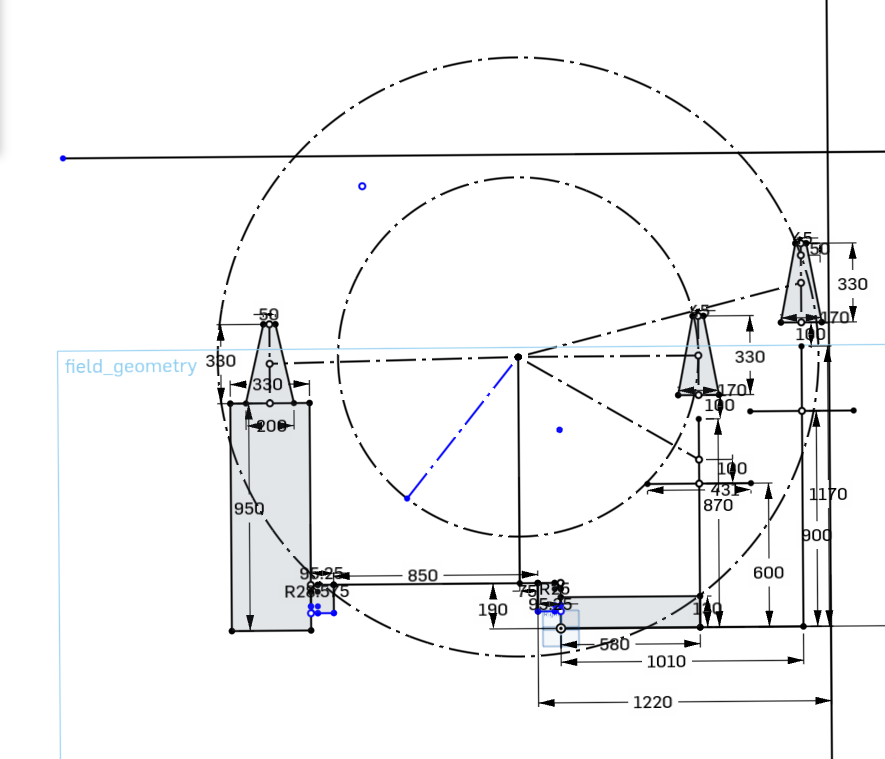
The emplacement mechanism’s job is to move the end effector to the required positions quickly and reliably. We brainstormed and evaluated a number of different approaches such as a double jointed arm, a large four bar linkage and a slanted elevator but decided that a rotating arm that is able to extend best meets our requirements. We have began CAD of a first iteration of this arm which we plan to get done very quickly to allow the other sub teams to test with
Onshape Screenshow
Prototype
Team working on mechanism
End effector:
This week we have prototyped our claw mechanism that will allow us to effectively pick up both the cubes and cones. The problem we have been trying to solve is how to make it compact enough to be mounted on the end of the arm of the robot and not interfere with the movement of it. We have decided on a 4 bar mechanism that allows for ample movement in a small area.
Onshape Screenshow
Prototype
Team working on mechanism
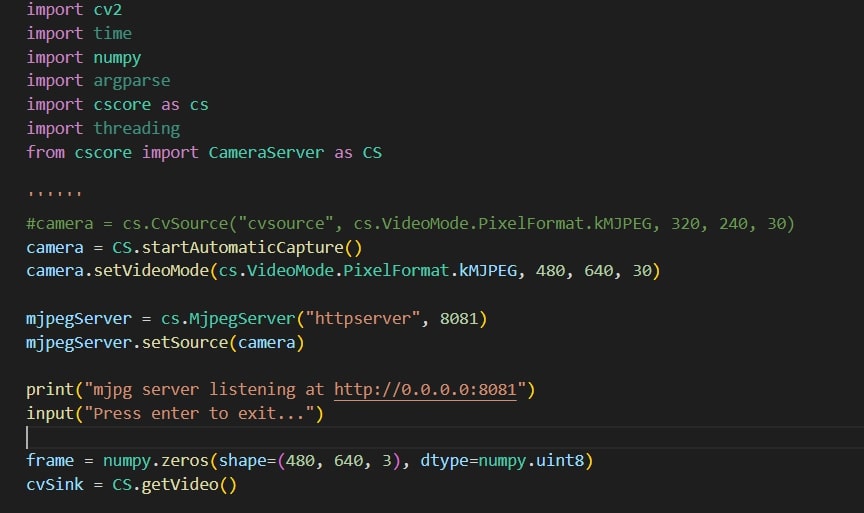
Software
Writing a program for the visual aspects of the thing we used open cv to find the masked images of both cones and cubes and was able to calculate the area of their contours individually. After we got that down the code to do all that was applied to something else that could identify cones and cubes in different positions within a bounding box.
The controls team has been busy and has made good progress on a number of projects. One of those is to have the robot work out where on the field it is by combining the Apriltags ( simplified version of QR code) and wheel odometry. We then use this position to automatically drive to and line up with scoring or pickup positions, meaning the driver does not have to worry about accurately lining up with things. We have also made good progress on a vision system to track which pieces have been scored in which nodes throughout the game, we use this to automatically choose which node the robot should score on and to inform the driver of strategy live in the match.