Advanced prototyping, testing and writing robot code
This week the team refined the prototyping and completed the initial vision tracking code.
Intake
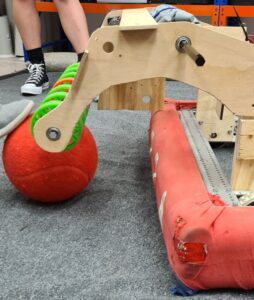
The prototype structure was strengthened with larger, more robust arms and was trailed with a single shaft and 7 compliant wheels.
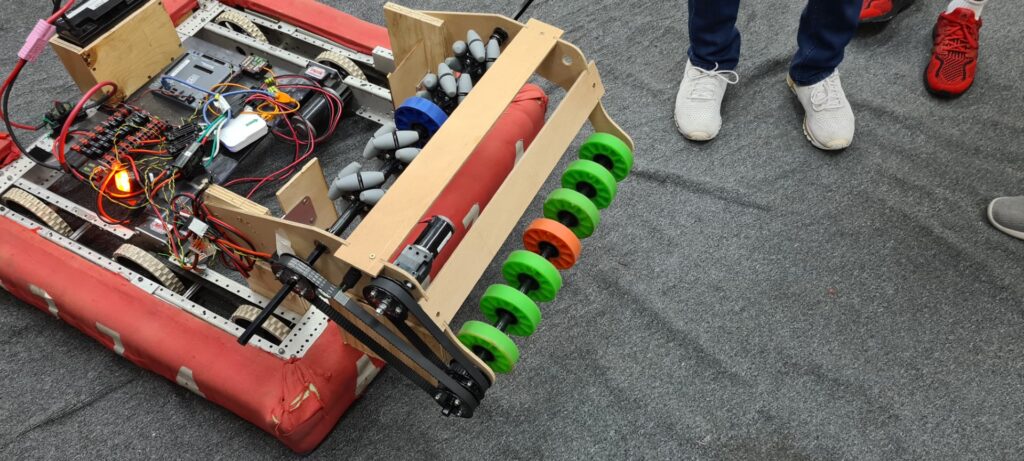
This did not allow for a consistent cargo ball intake. The final prototype has 2 shafts. One with 7 compliant wheels and one with 4 mecanum wheels and a single compliant wheel in the centre. This resulted in a reliable intake from the front o f the robot.
Single roller intake test with original support arms.
Dual axle intake with mecanum wheels
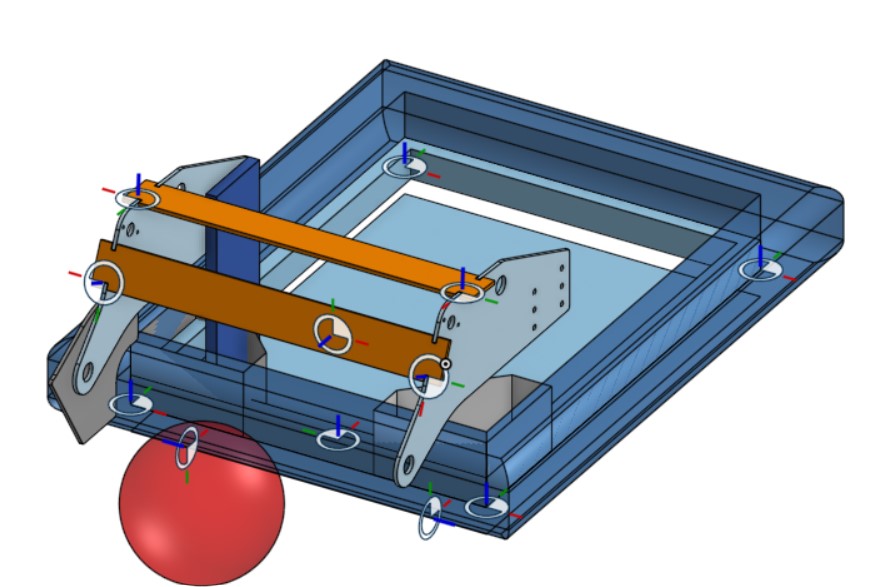
Dual axle intake with larger support arms Onshape 3D model
Dual axle intake with larger side supports
Indexer
This is the transition mechanism between the intake and the shooter and stores one cargo ball for delivery into the shooter. Prototyping of a simple concept proved a reliable cargo ball transport system can be build.
Vertical section of indexer
Shooter
Further testing and design modifications resulted in a near final prototype of the shooter using additional wheels spinning at different speeds.
Vision Code
We are writing code to reliably track the centre of the target (hub) using OpenCV on Python with a green LED, a USB camera and retroreflective tape on the hub.
The image is filtered by green light reflected to identify the top of the hub and will be used to aim the shooter.