4 Weeks to go to Southern Cross Regional competition
The team is under a lot of pressure to complete the final mechanisms so that full robot testing can be done.
Some of the prototyping did take longer than expected and the CAD design for the final mechanisms could not be completed ready for machining.
Intake
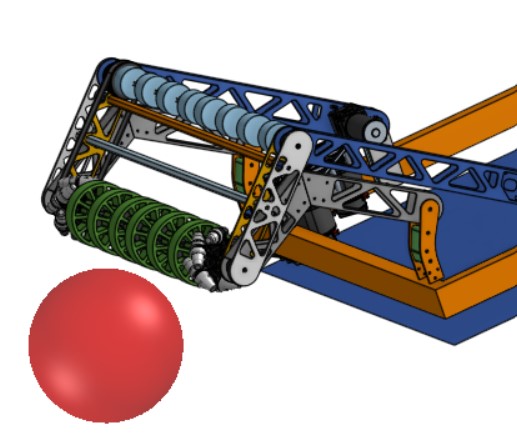
The intake has been machined and assembled and fitted to the robot.
Design for the pneumatic deploy and retrieval system still needs to be completed and fitted to the robot.
Onshape intake right side view
Final intake mounted on robot
Indexer
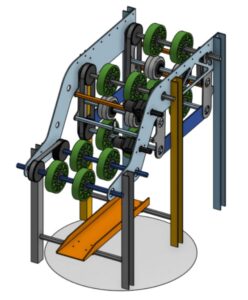
The indexer design was further developed resulting in the addition of a set of rollers to transport the cargo ball into the shooter. This reduces the compression of the ball and required motor torque.
Onshape indexer assembly ready for manufacture
New indexer prototype ready for testing
Shooter
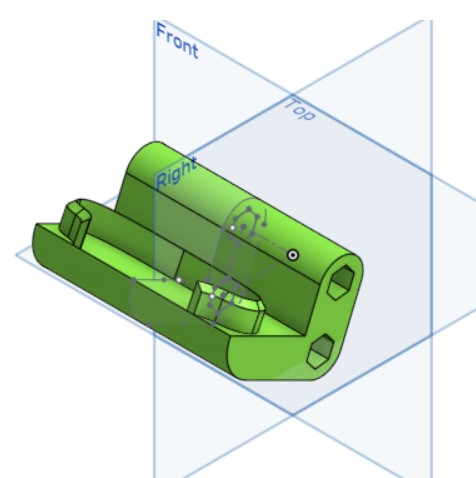
The shooter has been tested with a variety of gear ratios to achieve the required target ranges from short to long shots and a new more stable camera mount designed, 3D printed and fitted to the front of the shooter.
New shooter camera mount design ready for 3D printing
Late night target practice
Short distance shooter test
Shooter gearing adjusted
Motor gearing adjusted and new camera mount fitted
Drive Base
Bumpers for the drive base in the two alliance colours are finished and ready to be used on the robot.
Competition bumpers have the team numbers ironed on
Front bumper fitted to the robot
Robot Code
Additional robot code was written to improve the position locating of the robot and target indentification.
Robot code testing
Technology
Tony has been busy upgrading and fixing our desktop computers to allow faster and more reliable CAD design. We now have 3 fast desktop machines.
Workshop
With the assistance of the rookie members, old components were disassembled to salvage parts, pneumatic pistons sorted and the stock wheels were sorted by size and type.
Compliant and small rubber wheels
Pneumatic and Mecanum wheels
Omni Wheels large and small and stock drive base wheels
Old swerve modules disassembled to retrieve motors, encoders and other parts
Donated pneumatic cylinders are sorted and ports taped up to prevent contamination.