Robot Assembly Complete and Software Testing Underway
Congratulations to our team for achieving a significant milestone in our preparation for the FIRST FRC robotic competition! We’re proud of the hard work, dedication, and passion that each team member has demonstrated throughout this journey. Now we have a fully assembled robot , it’s time to reflect on what we’ve learned from the experience and challenges that we faced in the past couple of weeks.
First things first, preparation is key. Our team spent the initial weeks designing, prototyping , and testing concepts, but we discovered that there’s always room for improvement. We could have benefited from more testing and fine-tuning, which would have helped us identify and resolve issues earlier.
Communication is crucial.We realised that clear and consistent communication among team members is essential, especially when it comes to coordinating tasks and troubleshooting problems.
FRC competitions require teamwork, and we discovered that our success depended on our ability to work together effectively. We learned to rely on each other’s strengths and support each other’s weaknesses, and we discovered that collaboration and cooperation can lead to great results.
We’re excited to finalise the robot build and programming and to get ready to be in .Wollongong on 10-12 March 2023.
Drivebase & robot assembly
With the robot nearly fully complete it is now time to make the 2 sets of bumpers in the red and blue alliance colours.
The bumpers need to be quickly installed and removed for robot service and when alliance colours are changed.
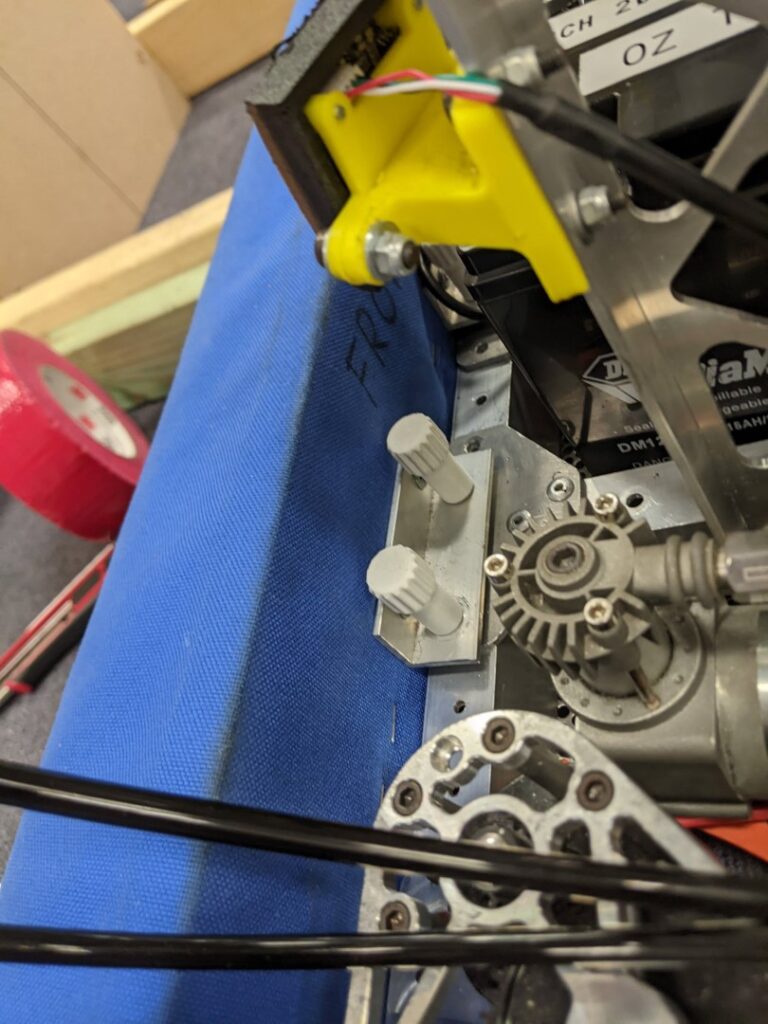
To make this a ‘toolfree’ process to mechanical team designed a bumper fixing nut that can be hand tightened easily.
Onshape completed design
Bumper fittings installed
Team numbers ready to be ironed onto bumper fabric
Embracement & Intake and End Effector
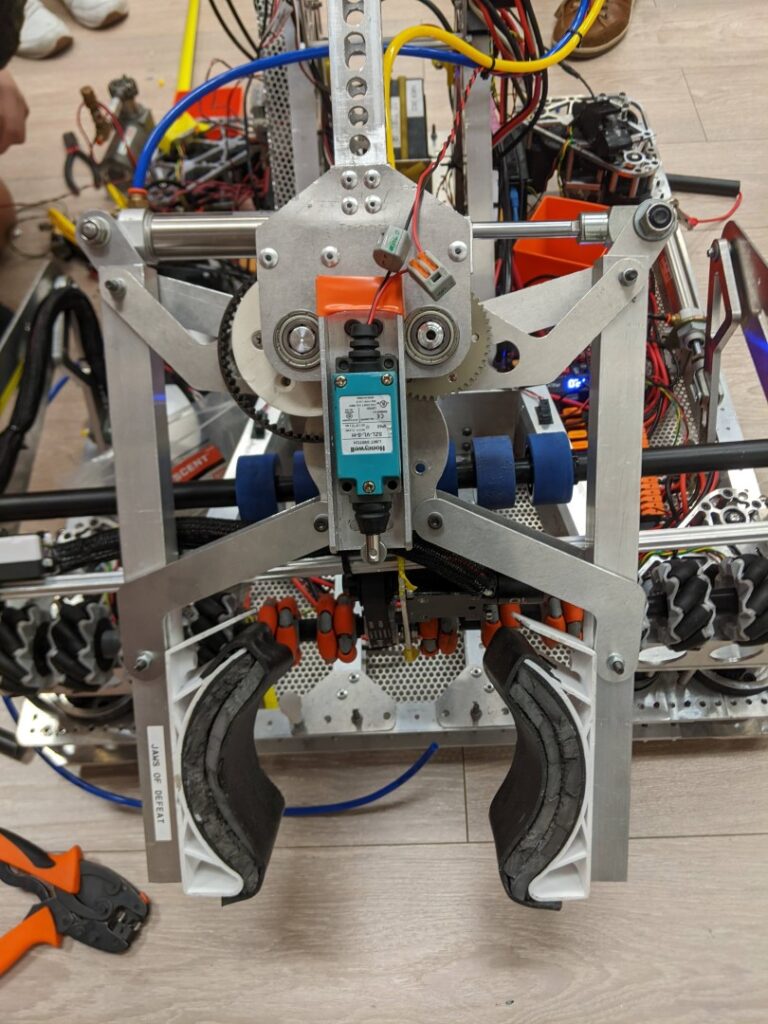
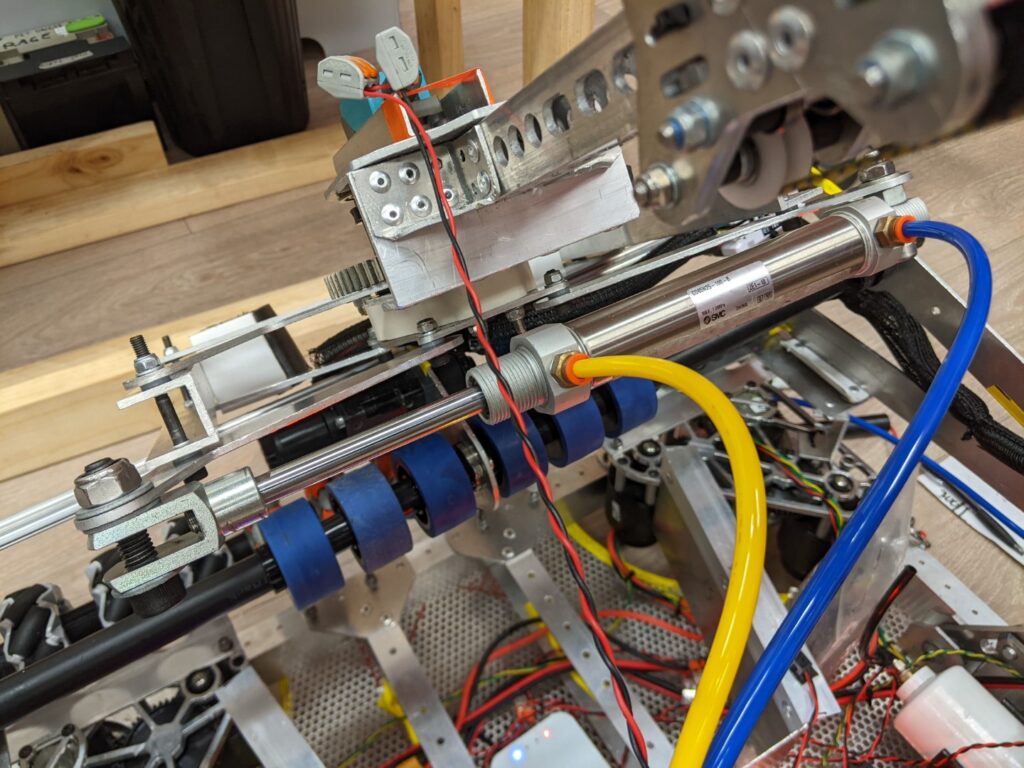
The end effector is now fitted to the arm and robot and the rotary pneumatic piston was replaced with a standard cylinder. This provided more force at the gripper to hold the cones.
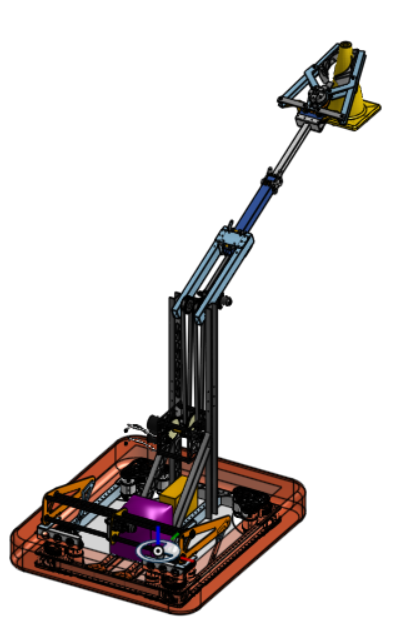
Robot assembly in Onshape
Endeffector with modified geometry
Endeffector pneumatic cylinder
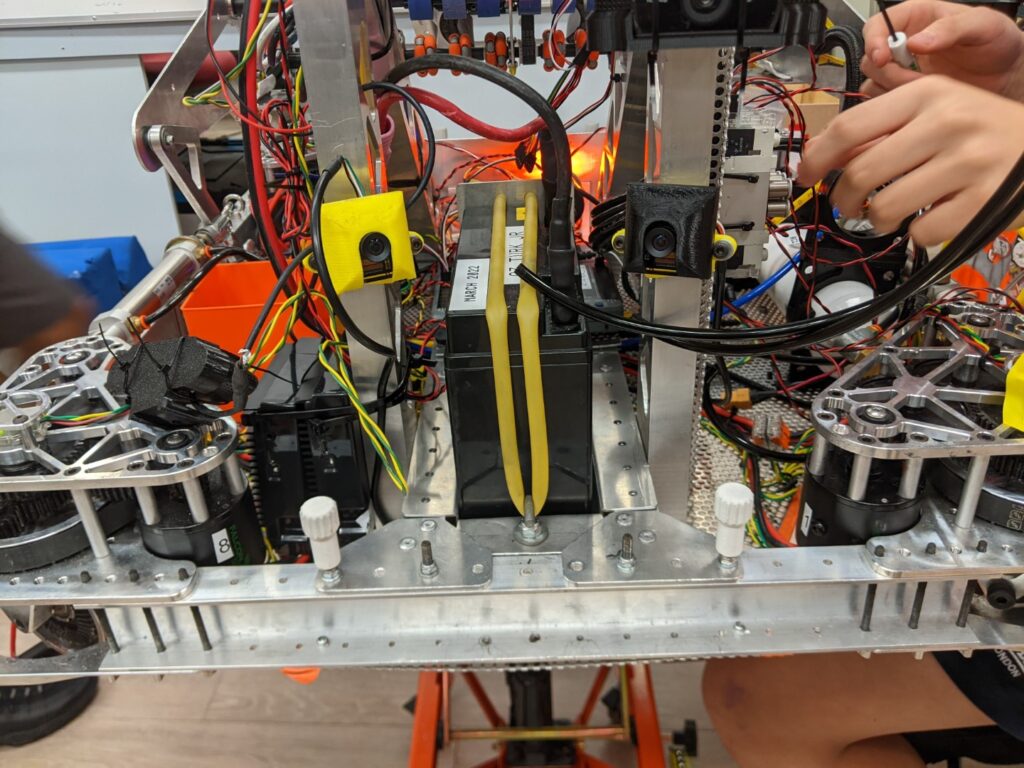
Software
The software team has been busy getting the robot fully operational this week. They have been working on a number of things including: the LED indicators to display the robots intent and state to the human player and drivers, the coordinated control of the arm and other robot subsystems, an autonomous mode to score 3 game pieces, tuning the apriltag vision system and creating the vision system to track scored game pieces.